Основные конструктивные параметры печатных плат
|
Параметры реализации |
Варианты реализаций микропроцессора базовой операции |
||||||||||
|
Рис. 3.9,а |
Рис. 3.9,6 |
Рис. 3.9.S |
Рис. З.Э.г |
||||||||
|
Тип используемых микросхем |
К1800ВС1 |
К500ИШ79 |
КР1802ВВ1 |
КР1802ВР5 |
КМ1804ВС2 |
КМ1804ВР1 |
КР1802ВР5 |
КР1802ИМ1 |
КР1802БВ1 |
KPI802BP5 |
КР1802ИМ1 |
|
Число микросхем, шт. |
8 |
2 |
4 |
1 |
4 |
1 |
4 |
24 |
4 |
1 |
4 |
|
Период вычисления БО, мкс |
1,86 |
1,2 |
0,2 |
0,9 |
|||||||
|
Среднее число выводов одной микросхемы, шт. |
40 |
40 |
50 |
43 |
|||||||
|
Шаг установки микросхем, мм |
50X38,5 |
47,5x32,5 |
45x38,5 |
42,5x32,5 |
|||||||
|
Размеры краевых полей (x1; х2; у1, у2), мм |
5; 5; 5; 22,5 |
5; 5; 5; 22,5 |
5; 5; 5; 22,5 |
5; 5; 5; 22,5 |
|||||||
|
Размеры печатной платы, мм |
110X220 |
105x190 |
190X297 |
137,5X125 |
|||||||
|
Площадь печатной платы, см2 |
242 |
199,5 |
564,3 |
171,5 |
|||||||
|
Потребляемая мощность, Вт |
12,6 |
17,2 |
56 |
16,6 |
|||||||
|
Удельная потребляемая мощность, Вт/см2 |
0,05 |
0,09 |
0,0992 |
0,097 |
Из анализа данных табл. 3.7 вытекает, что предпочтительными вариантами реализации МП БО являются структуры, изображенные на рис. З.ЭДг.
3.4. АВТОМАТИЗАЦИЯ ВЫБОРА ЭЛЕМЕНТНОЙ БАЗЫ ЗАПОМИНАЮЩИХ УСТРОЙСТВ
Большое число типов БИС ЗУ и противоречивость требований, предъявляемых к модулям памяти, предопределяют многообразие вариантов их реализации. Выбор оптимального варианта представляет собой сложную задачу, решение которой без использования средств автоматизации затруднительно.
Рассмотрим алгоритм выбора элементной базы ЗУ по критерию минимума общей площади монтажных плат. Исходными данными являются: емкость ОЗУ (ПЗУ), определяемая на этапе анализа алгоритма; разрядность операндов, констант, команд и их количество; частота дискретизации входного сигнала; длительность цикла вычисления результата (7ц); допустимое значение удельной мощности рассеивания; допустимое значение интенсивности отказав или нара1ботка на отказ; возможные конструктивные варианты реализации модуля ЗУ: печатная плата (одно- или двухсторонняя, многослойная), микросборка (однослойная, многослойная). Кроме параметров реализации модуля ЗУ задают также основные характеристики и перечень заданных серий микросхем ЗУ. Этот перечень может быть задан в виде таблицы, по форме аналогичной табл. 3.4, но содержащей следующие столбцы: серия БИС ЗУ, емкость (слов), разрядность, длительность цикла обращения, потребляемая мощность, интенсивность отказов, тип корпуса или размеры кристалла и др.
1. Определяется коэффициент распараллеливания ЗУ, обеспечивающий считывание и запись информации в реальном времени:

где N0=NBX + NBb!x — общее число входных операндов, считываемых из ОЗУ (ПЗУ) (iVBx), и результатов вычислений, записываемых в ОЗУ за время одного цикла вычислений 7Ц; t0 — длительность цикла обращения, под которым понимается либо большее из времен записи ш считывания (для ОЗУ), либо время считывания ПЗУ.
2. Рассчитывается коэффициент распараллеливания ОЗУ, обеспечивающий временное согласование работы АЦП и ОЗУ, предназначенного для хранения входного массива:

Выбираем Kр>mах {К1Р, К2р}. Это значение обеспечивает работу МПУ в РМВ.
3. Распараллеливание блоков памяти приводит к необходимости использования буферного ЗУ (БЗУ), выполняющего временное согласование работы ОЗУ (ПЗУ) и МП. Можно выделить два типа БЗУ: первое принимает информацию с АЦП и МП. Общее число входов-выходов этого БЗУ равно No + l, а разрядность (N0+l)l. Между БЗУ и ОЗУ обычно находится мультиплексор, коммутирующий (N0 + 1)l входов на Kpl выходов, соединенных с входами блоков ОЗУ.
Буферное ЗУ второго типа устанавливается между выходом ОЗУ и МП. На вход БЗУ поступает информация с К выходов блоков памяти разрядностью KL Эта информация коммутируется на l входы АУ.
Число микросхем регистрового БЗУ

где l БЗУ1, lбзу2 — разрядность регистров БЗУ первого и второго типа. Для коммутации информации используются мультиплексоры типа (N0+ 1) X 1 и K Х 1 соответственно. ;.
4. Число микросхем для реализации ОЗУ

где Е — число слов ОЗУ, lОзу, Eозу — разрядность и число адре--сов микросхем ОЗУ соответственно.
5. Аналогично п.4 определяется число микросхем ПЗУ.
6. Определяется значение интенсивности отказов модуля ЗУ:

где Кi — число микросхем i-й серии в модуле
ЗУ; Хг — интенсивность отказов микросхем i-й серии; k — число типов микросхем, используемых при реализации модуля ЗУ. Если Лзу<лдоп, то переход к п.8, если нет, то переход к п.7.
7. Определяется тип и кратность резервирования блоков ЗУ, обеспечивающих Л3у<ЛДОП при минимальной площади монтажных плат. Методика решения задачи оптимального резервирования изложена в [49].
Резервирование является одним из методов повышения надежности функционирования устройств. Другие методы и их сравнительный анализ рассмотрены в [47].
8. С учетом полученных значений кратности резервирования определяется общая площадь монтажных плат Sj, необходимая для размещения модуля ЗУ, реализованного на конкретном j-м наборе микросхем.
Методика вычисления площади подложек микросборок заданного набора микросхем приведена в § 2.4. Порядок расчета площади печатных плат рассмотрен в примере 3.3.
9. Вычисляется удельная мощность рассеивания модуля ЗУ, реализованного на j-м наборе микросхем:
где Pi — мощность, потребляемая микросхемой i-го типа; k — коэффициент полезного действия (& «0,24-0,3).
Сравниваем полученное значение рУА j с допустимым значением рдоп. Если Рудi>рДоп, то корректируем значение Sj:

10. Расчеты по пп. 1 — 9 повторяются для всех возможных наборов типов микросхем, заданных в исходных данных.
После про ведения всех вычислений получаем массив значений


где G — максимальное число возможных вариантов реализации модуля ЗУ. Оптимальным считается такой набор серий микросхем, который дает минимальное значение S3y.
При м е р 3.4. Определить структуру и оптимальные параметры модуля ОЗУ МП БО, рассмотренного в примере 3.3.
Исходные данные: емкость ОЗУ EОзу =256 слов, длительность цикла вычисления ТЦ = Т-О =2 МКС Разрядность массива входных отсчетов 8, выходных 16. Частота дискретизации Fд=1 МГц. Основание преобразования r=2. Допустимое значение удельной мощности рассеивания: pДOП=0,02 Вт/см2. Наработка на отказ T=104 ч. Тип конструкции — односторонняя печатная плата. Модуль ОЗУ реализуется на микросхемах, приведенных в табл. 1.5.
1. Выбираем из табл. 1.5 первый этап микросхем — КР132РУ6А.
2. Определяем коэффициент распараллеливания ОЗУ:
3. Поскольку Кр=1, модуль ОЗУ может быть реализован одним блоком; зходные, выходные и промежуточные массивы отсчетов будут записываться по свошл адресам. Разрядность слов принимается максимальной — 16 бит.
Число микросхем КР132РУ6А, необходимое для реализации модуля ОЗУ, равно

4. Полагая, что интенсивность отказов любой микросхемы из табл. 1.5 равна 10-6, определяем наработку на отказ модуля ЗУ:

5. Считая, что установочные размеры микросхемы равны 36X32,5 мм, а значения краевых полей х1=Х2=y1=5 мм, y2=10 мм, определяем площадь печатной платы, необходимую для размещения микросхем КР132РУ6А:

6. Удельная мощность рассеяния модуля ОЗУ

Корректируем значение площади печатной платы: S=8/0,02=400 см2. 7. В соответствии с алгоритмом необходимо повторить вычисления для каждой серии табл. 1.5. Однако даже поверхностный анализ показывает, что оптимальной будет серия КР537РУ8А. При условии равенства установочныж размеров микросхем площадь печатной платы для этой серии равна 24,1 см2.
Таким образом, приведенный выше алгоритм позволяет выбрать серию микросхем, обеспечивающих реализацию модулей памяти в рамках заданных ограничений и при минимальной площади монтажных плат.
Без существенной пе ределки алгоритм может быть использован для выбора элементной базы ЗУ по другим критериям.
3.5. ВЫБОР АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАТЕЛЯ
Аналого-цифровое преобразование входного сигнала x(t) заключается в дискретизации его по времени и квантованию получаемых дискретных отсчетов по уровню. При выполнении этих процессов входной сигнал представляется последовательностью чисел в той или иной позиционной системе счисления. Неидентичность представления сигнала в цифровую форму называют потерями, или шумами аналого-цифрового преобразования [2, 30], Источниками этих шумов являются временная дискретизация сигнала и его амплитудное квантование. Для случая вероятностной оценки шумов, когда ошибки дискретизации и квантования представляются как случайные шумоподобные процессы типа «белый шум», причем любые два источника шума некоррелированы, шумы АЦП суммируются с входными шумами, шумами вычислений» снижая отношение сигнал-шум на выходе МПУ.
Уровни шумов аналого-цифрового преобразования зависят от параметров АЦП, которые обусловлены характеристиками входного сигнала.
Среднее значение тАцп и дисперсия а2АЦП шума квантования в зависимости от выбранной системы счисления и способа округления результата определяются соотношениями:
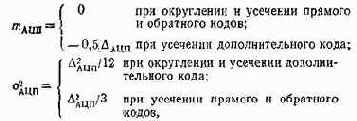
где ДАцп — шаг квантования.
Зависимость уровней шумов от частоты дискретизации и длительности выборки АЫП будет рассмотрена ниже.
Итак, при выборе АЦП на основании характеристик обрабатываемого сигнала определяют требуемые параметры АЦП: частоту дискретизации, длительность выборки, разрядность и потери, вносимые аналого-цифровым преобразователем. Затем из группы АЦП, параметры которых соответствуют вычисленным значениям, определяют оптимальный. Следует отметить, что небольшое число типов АЦП относительно типов микросхем ЗУ или МП облегчает решение этой задачи и сводит ее практически к определению основных параметров АЦП, удовлетворяющих обрабатываемому сигналу.
Выбор частоты дискретизации входного сигнала зависит от диапазона обрабатываемых частот.
В соответствии с теоремой Котельнмкова FM,>2fmaкc, где fмакс — максимальная частота спек тра сигнала. Однако при дискретизации входного сигнала на несущей частоте огибающая его спектра S(f) состоит из двух симметричных относительно начала координат огибающих составляющих спектров S+(f) и S-(f), причем S(f) =5+(f) +S-(f) (рис. 3.10). Если принять, что спектральная плотность сигнала равна нулю вне полосы ( — fс — AF, — fc + AF) — для отрицательных частот и (fс — AF, fc + AF) — для положительных частот, то можно выбрать Fa значительно ниже, чем fмакс.
При выборе Fц исходят из условия, что К и К-М переносов огибающей спектра S~(f) не образуют пересечений с S+(f). Если пересечений с S+(f) нет, то в силу цикличности спектра эти пересечения отсутствуют во всем диапазоне частот.
Пересечения спектров будут отсутствовать лишь при выполнении следующего условия [50]:

Решая систему неравенств (3.13) относительно FR, получаем

Используя неравенство (3.14), можно построить области допустимых значений частот дискретизации, обеспечивающие отсутствие пересечений составляющих спектра S+(f) и S~(f), так как для всех частот, принадлежащих этим областям, будет справедливо неравенство Fд>4ДF. Наибольший интерес представляет выбор минимально возможной частоты дискретизации. Такой выбор соответствует FR/2ДF>2. При этом необходимо учитывать, что при снижении FA уменьшается — бf и +6f, т. е. огибающие спектра сближаются.
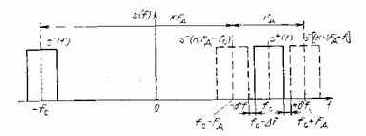
Рис. 3.10. Выбор частоты дискретизации входного сигнала
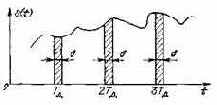
Рис. 3.11. Определение длительности выборки аналого-цифрового преобразователя
Длительность выборки АЦП существенно влияет на величину потерь квантования. Обычно считается, что выборка происходит за время, значительно меньшее длительности периода входного сигнала, и поэтому эти выборки условно можно считать дельта-функциями — 8(t — KTK). При квантовании на несущей частоте период входного сигнала уменьшается и становится соизмеримым с длительностью выборки АЦП (рис, 3.11).
С учетом конечной длительности выборки дискретизированный входной сигнал можно представить следующим образом [50]:
где 0 — длительность выборки входного сигнала.
Считаем, что выборку АЦП можно аппроксимировать прямоугольной функцией вида

Подставив эти значения в (3.15) и приведя необходимые преобразования, получим выражение для спектра сигнала с учетом длительности выборки [50]: V

где S(f) — спектр сигнала при длительности выборки сигнала,; стремящейся к нулю S(f) — спектр сигнала при длительности выборки, равной ф.
Сомножитель sin (пfф)/(пfф) приводит к снижению амплитуды спектральных составляющих, что эквивалентно уменьшению отношения сигнал-шум, а следовательно, увеличению потерь. Сомножитель ехр( — jnfQ) приводит к сдвигу фазы спектральных отсчетов, причем величина сдвига зависит от диапазона частот принимаемого сигнала.
С точки зрения уменьшения отношения сигнал-шум, определяющим является значение первого сомножителя.
В табл. 3.8 приведены основные результаты роста потерь при увеличении длительности выборки .входных отсчетов.
